| まじっすか〜 |
|---|
 それは一通のメールからはじまった…。
それは一通のメールからはじまった…。
マザーボードロボも公開してから半年以上経ちましたが、せいぜいMLのオフ会に持っていった程度で、
特に多くの人の目に触れることはありませんでした。
私の部屋では棚の中でオブジェとして飾られていたわけですが、突然コムサテライトさんから
展示させて欲しいという依頼があり、急遽改造を加えることになりました。
元々バッテリーで駆動するために、店頭で長時間展示するのには無理があります。
設計がいい加減なのでバッテリーの交換も一苦労です。
ということで全てACアダプターで動かせるようにしました。
【今回の仕様変更】
・モーターの電源をACアダプターから取り、電圧可変できるようにする
・モータードライバーICを使用せず、リレーだけでモーターをコントロールする
・USB制御からRS-232C制御に変更する
|
| モーター電源 |
|---|
 今までは3本のNiMH電池をモーター用のバッテリーとして使用していましたが、これだと交換の必要が
でてきてしまいます。ここでマザーボードの電源だけでなく、モーターもACアダプターから電源を供給するようにします。
今までは3本のNiMH電池をモーター用のバッテリーとして使用していましたが、これだと交換の必要が
でてきてしまいます。ここでマザーボードの電源だけでなく、モーターもACアダプターから電源を供給するようにします。
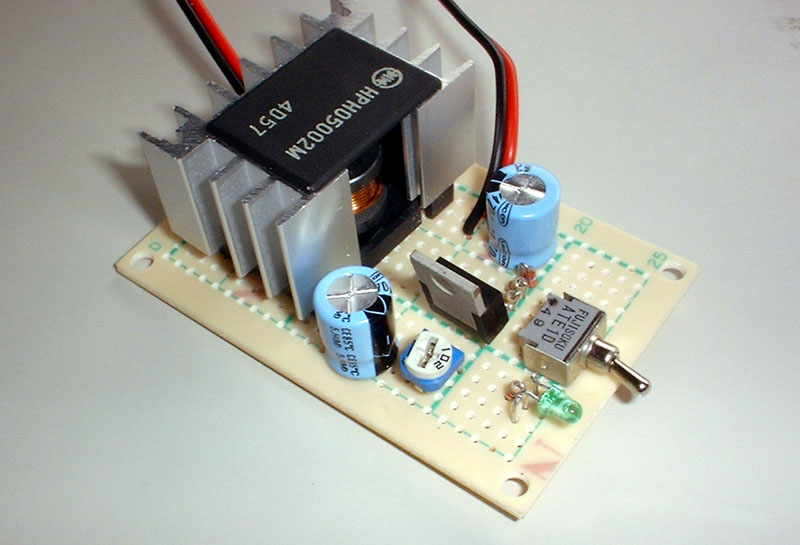
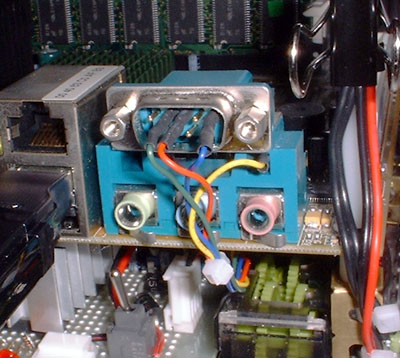
回路はいたってシンプルで、いつものDC-DCコンバーターユニットで12Vから5Vに落とし、その5Vをさらに電圧可変3端子レギュレーターIC
で3V前後の電圧を作っています。電圧はボリュームで変更できるので、モーターのスピードはここで変更することができます。
|
| 制御回路 |
|---|
 今まではモータードライバIC TA7291Sを使用してモーターの正転・逆転を制御していましたが、
このICを使用するとモーターに加わる電圧が、実際のモーター用電源の電圧よりも低くなってしまいます。
これは「動くスピードが遅い」という欠点の1つの理由です。
今まではモータードライバIC TA7291Sを使用してモーターの正転・逆転を制御していましたが、
このICを使用するとモーターに加わる電圧が、実際のモーター用電源の電圧よりも低くなってしまいます。
これは「動くスピードが遅い」という欠点の1つの理由です。
当時は理由はわからなかったわけですが、TA7291Sの仕様書のVs-Voutのグラフを見て納得。
どうしても電圧が下がってしまうらしいので、いっそのことリレーにしちゃえ!!ってことで、
すごく原始的な回路でいくことにしました。
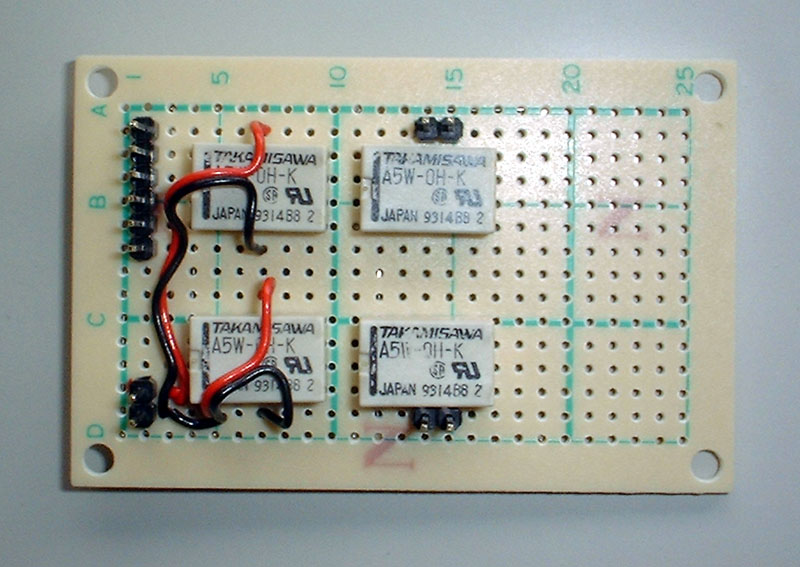
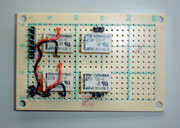
裏はこんな感じ。
2回路3接点のリレーを4個使い、4ビットで2chのモーターを制御できます。
 RS-232Cの制御回路はシステム工房 クロスハードさんの
モジュールを使用しました。このキットは汎用性を持たせて設計されているため、実装しない部品も多くあります。
今回はRS-232Cからデータを受信して、I/Oに出力するだけという使い方をしました。
RS-232Cの制御回路はシステム工房 クロスハードさんの
モジュールを使用しました。このキットは汎用性を持たせて設計されているため、実装しない部品も多くあります。
今回はRS-232Cからデータを受信して、I/Oに出力するだけという使い方をしました。
|
| 組み込んでみる |
|---|

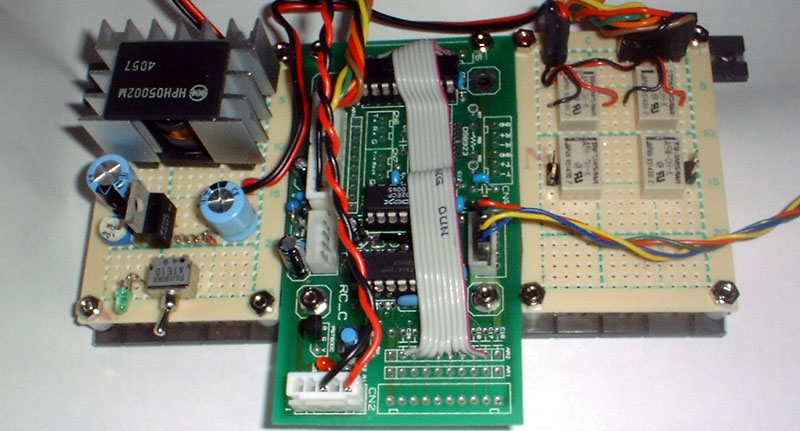
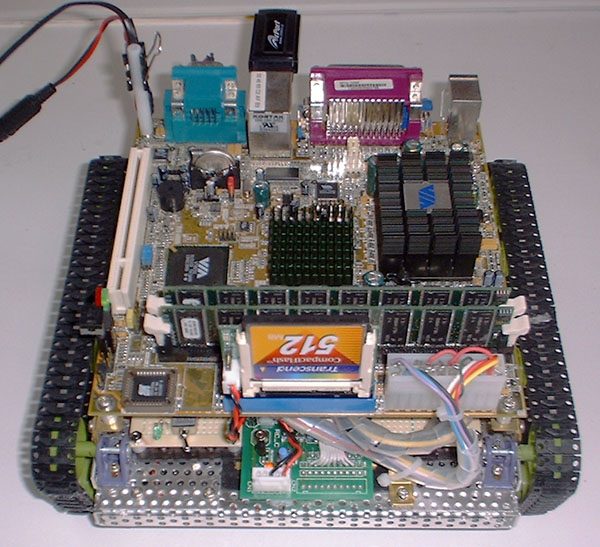
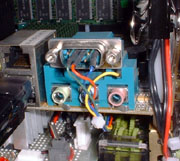
 一応なんとか収まりました。ちょっとRS-232Cの基盤が出っ張ってますが…。
一応なんとか収まりました。ちょっとRS-232Cの基盤が出っ張ってますが…。
|
| ソフトを考えていなかった… |
|---|
 さーて、これで動かすぞ!と思いましたが、肝心なことを忘れていました。
RS-232Cだからソフトを作り直さなければなりません。相変わらず計画性がありません。(^^;
さーて、これで動かすぞ!と思いましたが、肝心なことを忘れていました。
RS-232Cだからソフトを作り直さなければなりません。相変わらず計画性がありません。(^^;
RS-232CならPerlでちょこちょこって書けちゃうだろうと思っていたわけですが、ところがどっこい、
WindowsはLinuxのように簡単にデバイスにアクセスできないらしい…。
またしてもビルゲイツを恨む理由が1つ増えました。(笑)
私はWindowsのアプリは作れません。唯一作ったのはVisual Basicの「Hello World」です。
(Hello Worldの意味がわかる方は笑ってますね、今頃(^^))
明日COM/3に持っていかないといけないという焦りもあり、今回はTera Term Pro
のマクロ機能を使ってコマンドを送信するという、荒技でいくことにしました。リレー回路といい、制御方法といい、退化してます・・・。
|
| ニュース掲載!サーバーダウン! |
|---|
コムサテライトさんにマザーボード・ロボを預けてきたその日に、各誌ニュースメディアで取り上げていただきました。
この場をお借りしてお礼申し上げます。
・Impress AKIBA PC Hotline!
・価格.com アキバ総研
しかーし、間もなくアクセス集中によりサーバーがダウンしました。(笑)
なにせOpenBlockSですから、
何千何万というアクセスには耐えられなかったようです。
ということでプロバイダーのHPスペースに移転したのですが、全然容量が足りません。
どなたか月額1,000円以内で固定IPアドレスがもらえるプロバイダー知ってたら教えてください。
2003.8.9 by Kaz
|
| メニュー |
|---|
- TOP
- はじめに
- フレームとバッテリー
- 電源回路
- モーター
- USBコントローラー
- 組み立てる
- 無線LAN
- ソフトウェアの選択
- ライブ中継
- 遠隔操作
- おわりに
- [おまけ] コムサテライト・エディション
|
| |