| USB-IO |
|---|
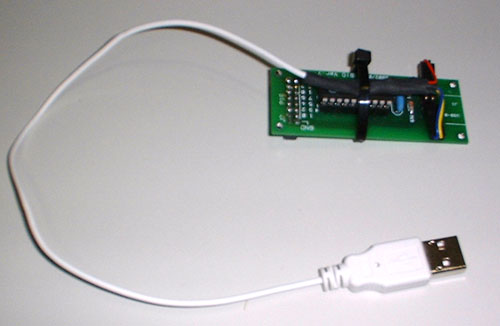
さすがにUSBコントローラーまで自作することはできませんので、モルフィー企画のUSB I/Oキットを使用することにしました。
USB-IOは全部で12bitの入出力が可能で、ヒューマンインターフェースデバイスとして認識するので特別なドライバーも必要ありません。
とは言え私にはデバイスにアクセスするようなプログラムは作れませんので、Mc.NさんのUSB-IO Utilityを使用することにしました。
usbio.exeはWindows上で動作する、コマンドラインタイプのプログラムです。
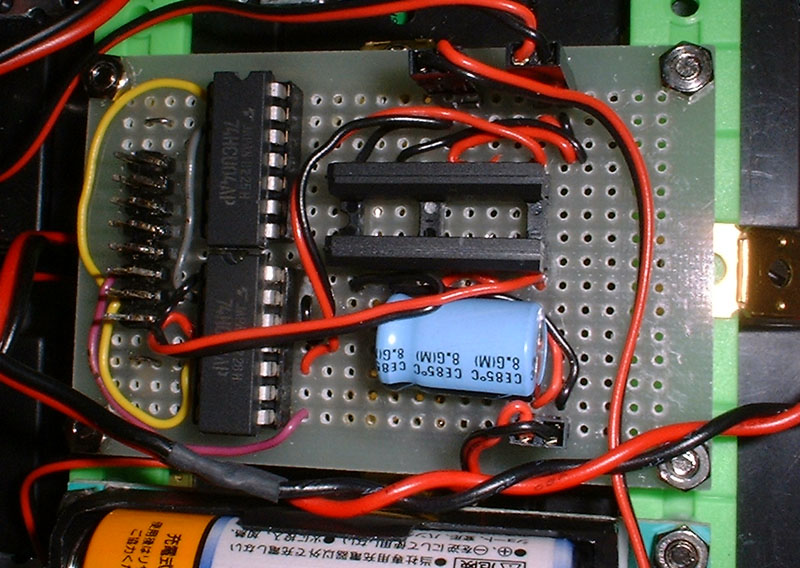
USB-IOの出力はモータードライバへ入力され、モーターの正転・後転・停止を行います。
モータードライバIC TA7291Sは1チャンネルあたり2bitの入力信号を必要とします。
今回は左右のモーターを合計3bitで制御するように設計しました。
(実は1bitをケチったのが失敗だったりします…)

USB-IOキット |

モーターコントロール回路 |

USB-IOを合体したところ |
|
| 回路図・真理値表 |
|---|
| IN |
OUT(L) |
OUT(R) |
動作 |
| 1(FB) |
2(L) |
3(R) |
OUT1 |
OUT2 |
OUT1 |
OUT2 |
| H
| H
| H
| ∞
| ∞
| ∞
| ∞
| 停止
|
| H
| L
| L
| L
| H
| L
| H
| 前進
|
| L
| L
| L
| H
| L
| H
| L
| 後退
|
| H
| L
| H
| L
| H
| ∞
| ∞
| 左 前進
|
| H
| H
| L
| ∞
| ∞
| L
| H
| 右 前進
|
| L
| L
| H
| H
| L
| ∞
| ∞
| 左 後退
|
| L
| H
| L
| ∞
| ∞
| H
| L
| 右 後退
|
※多少嘘や変なところがあるかもしれませんが、初心者故ご了承ください。(^^;
|
| 3bitの失敗 |
|---|
真理値表を見てのとおり、左右のモーターをそれぞれ逆方向に回転することができません。
後で気付いたのですが、キャタピラ式で方向転換するには、左右を逆方向に回転させる方が効果があります。
今回の回路では片側は停止する形になるので、回転速度が遅いという欠点もあります。
しかも4bitならUSBIOから直接信号を入力できたので、回路を簡素化できました。あー失敗。
|
| メニュー |
|---|
- TOP
- はじめに
- フレームとバッテリー
- 電源回路
- モーター
- USBコントローラー
- 組み立てる
- 無線LAN
- ソフトウェアの選択
- ライブ中継
- 遠隔操作
- おわりに
- [おまけ] コムサテライト・エディション
|
| |