| 究極のマザーボード・ロボ登場! |
|---|
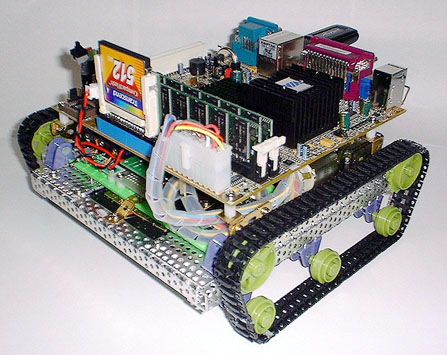
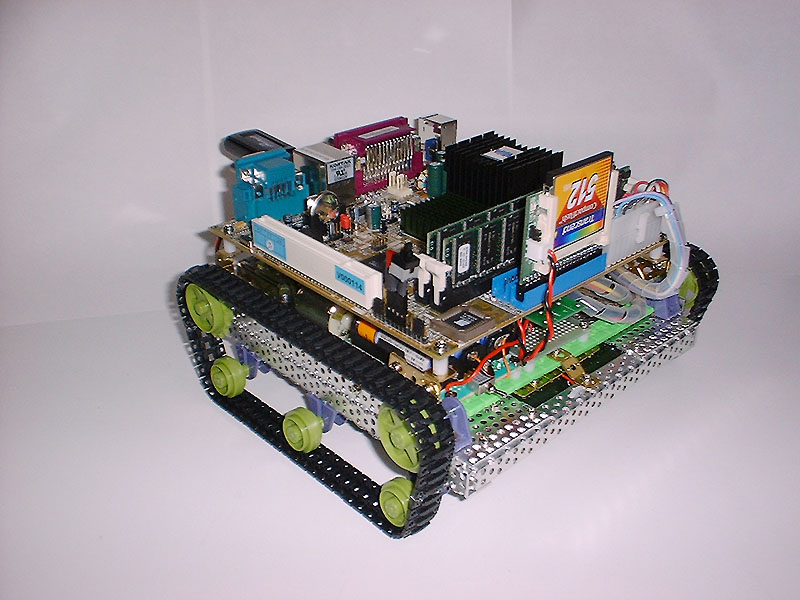
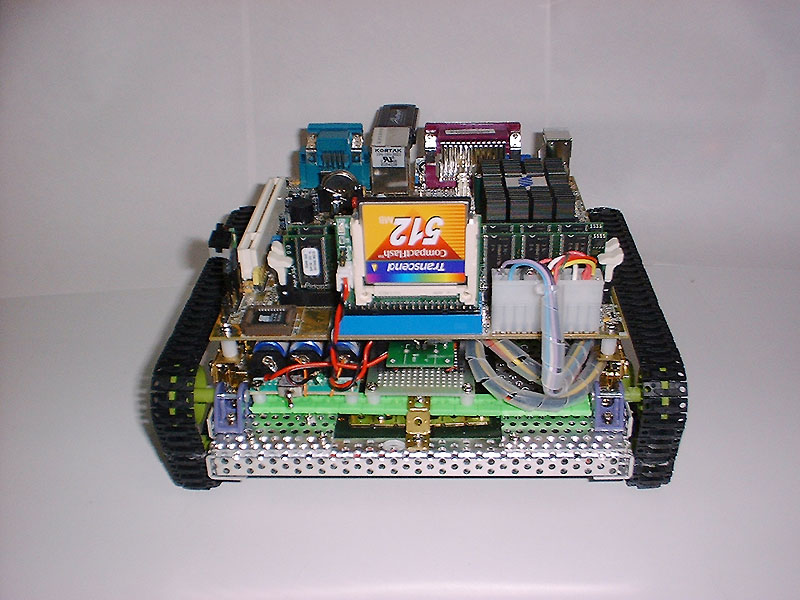
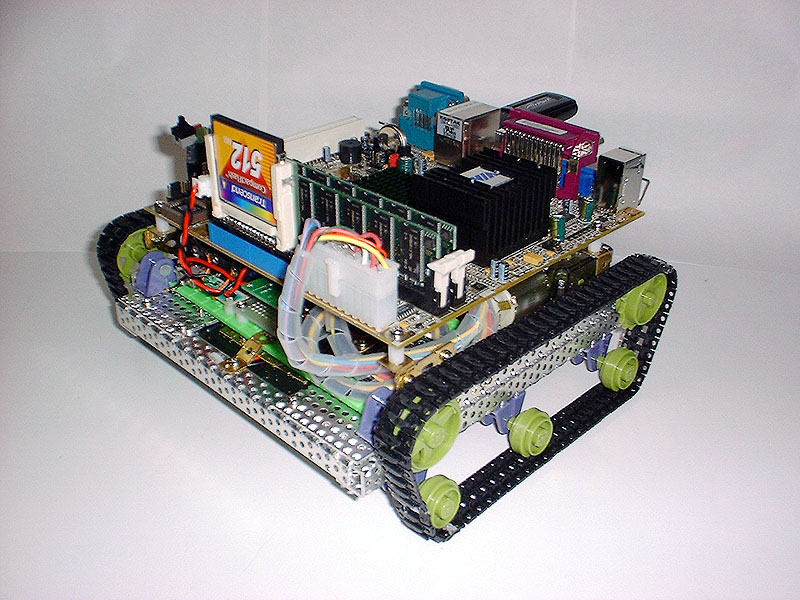
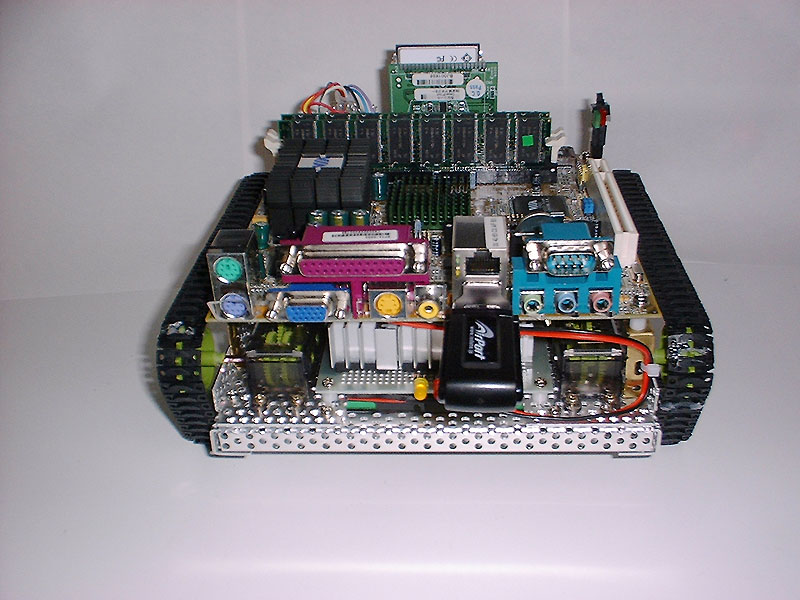
「走る!マザーボード・ロボット」はキャタピラで自走し、無線LANで遠隔操作をすることができます。
またバッテリーを内蔵していおり完全にワイヤレスで走らせることができます。
PCカメラを接続すれば何千キロも離れた遠隔地からでも操作をすることも可能。
災害救援活動から浮気調査まで幅広い範囲で活躍することでしょう。
なお今回の企画はDOS/V POWER REPORTの「動く!改造バカ一台」のバカバカしさと、「ハンダでGO!」の
実用的さをコンセプトにすすめています。DOS/V POWER REPORTの2コーナーは、来月から私がいただきます。(笑)
それではさっそく「走る!マザーボード・ロボ」ご覧にいれましょう。
|
| 動画はこちら |
|---|
※動画がコマ落ちする場合は、一時停止した後DL完了後に再生してください。

前進 |

前進と旋回 |

旋回 |

低い障害物 |

高い障害物 |

回転 |

突進・衝突 |

ロボットからの風景 |

遠隔操作画面 |
※CASIO EXILIM EX-S1にて撮影(音声はありません)
|
| 発想は「動く!改造バカ一台」 |
|---|
いかがでしたでしょうか?
「だから何?」って言わないでください。(笑)
面白いと思った方、ハードやソフトに興味がある方、改造バカな方はぜひ、あなたのオリジナル・マザーボード・ロボ
を作ってみてはいかがでしょうか。マザーボード・ロボはマザーボードにロボットが付いたものです。
ロボットに付いたマザーボードではありません。あくまで発想は「動く!改造バカ一台」なのです。
おれもこんなマザーボード・ロボを作ったぞって方は、是非ともご連絡ください。相互リンクしましょう。(^^)
|
| メニュー |
|---|
もっと詳しく知りたいという方はこちらをご覧ください。
- はじめに
- フレームとバッテリー
- 電源回路
- モーター
- USBコントローラー
- 組み立てる
- 無線LAN
- ソフトウェアの選択
- ライブ中継
- 遠隔操作
- おわりに
- [おまけ] コムサテライト・エディション
※私は電子回路の知識や機械の機構に詳しくありません。かなり嘘や適当な箇所があるのでご了承ください。
逆に言ったら初心者でもできるってことです。(^^;
|
| 2003.01.02 by Kaz |